Guía exhaustiva de OpenMind: creación de un sistema operativo global y una red de confianza para la inteligencia integrada
Por qué es esencial una era de robótica abierta
En los próximos 5–8 años, se prevé que la población mundial de robots supere los mil millones. Este hito representa un punto de inflexión determinante: los robots dejarán de ser simples demostraciones independientes para convertirse en agentes fundamentales dentro de la división social del trabajo. Ya no se limitarán a ser brazos mecánicos en cadenas de montaje; serán compañeros, docentes y colaboradores capaces de percibir, comprender, tomar decisiones y trabajar conjuntamente con las personas.
Aunque el hardware robótico ha evolucionado rápidamente—con manos más hábiles, locomoción estable y sofisticación sensorial—el auténtico obstáculo no reside en el metal ni en los motores, sino en dotar a los robots de la capacidad de compartir conocimiento y cooperar:
- El software entre fabricantes es incompatible, lo que impide que los robots compartan capacidades e inteligencia.
- La lógica de decisión queda encerrada en sistemas cerrados, lo que impide su verificación u optimización desde el exterior.
- Las arquitecturas de control centralizadas frenan la innovación y aumentan la desconfianza.
Esta fragmentación impide que la robótica transforme los avances en IA en productividad a escala: abundan las demostraciones aisladas de robots, pero carecen de migración entre dispositivos, verificación de decisiones y colaboración estandarizada. Por tanto, la escalabilidad real continúa siendo inalcanzable. OpenMind aborda este reto final. Nuestra meta no es desarrollar un robot que baile mejor, sino crear una base de software unificada y un estándar de colaboración para la diversidad robótica global:
- Permitir que los robots comprendan el contexto y aprendan unos de otros;
- Dar a los desarrolladores la posibilidad de crear aplicaciones rápidamente en plataformas modulares y de código abierto;
- Facilitar la colaboración y el cierre de transacciones entre humanos y máquinas de manera segura bajo protocolos descentralizados.
En resumen, OpenMind está creando el sistema operativo universal para robots, que permite no solo percibir y actuar, sino también colaborar de forma segura y masiva en cualquier entorno gracias a la cooperación descentralizada.
Quién apuesta por esta visión: 20 millones de dólares en financiación y un plantel global
OpenMind ha conseguido 20 millones de dólares en financiación Seed y Serie A, liderada por Pantera Capital y con la participación de referentes globales en tecnología e inversión:
- Tecnología y capital occidentales: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group, entre otros. Estas firmas son actores a largo plazo en infraestructura cripto e IA, impulsando la naciente “economía de agentes y el internet de las máquinas”.
- Recursos industriales orientales: Sequoia China y otros gigantes con amplia experiencia en cadenas de suministro y fabricación robótica, que conocen de primera mano los retos y umbrales reales de la producción y entrega masiva de máquinas.
Al mismo tiempo, OpenMind colabora con agentes tradicionales de los mercados de capital como KraneShares para buscar vías que integren el valor a largo plazo de “robótica + agentes de IA” en productos financieros estructurados, conectando los mercados cripto y bursátiles. En junio de 2025, cuando KraneShares lanzó el Global Humanoid & Embodied Intelligence Index ETF (KOID), fue “Iris”—un robot humanoide creado conjuntamente por OpenMind y RoboStore—quien tocó la campana de apertura en NASDAQ, siendo la primera vez que un robot humanoide realizaba dicha ceremonia en la bolsa.
En palabras de Nihal Maunder, socio de Pantera Capital:
“Si queremos que las máquinas inteligentes funcionen en entornos abiertos, necesitamos una red de inteligencia abierta. Lo que OpenMind desarrolla para los robots es el equivalente a lo que Linux supuso para el software y Ethereum para blockchain.”
Equipo y asesores: del laboratorio a la cadena de producción
Jan Liphardt, fundador de OpenMind, es profesor asociado en Stanford y exprofesor de Berkeley, especialista en datos y sistemas distribuidos con amplia experiencia en los ámbitos académico y de ingeniería. Defiende la reutilización de código abierto, reemplazando cajas negras por mecanismos auditables y trazables, fusionando IA, robótica y criptografía mediante enfoques interdisciplinarios.
El equipo principal aglutina talento procedente de OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity, entre otros. En conjunto, abarcan áreas clave como control robótico, percepción y navegación, orquestación multimodal y LLM, sistemas distribuidos y protocolos “on-chain”. Un consejo asesor integrado por líderes académicos e industriales—entre ellos Steve Cousins (responsable de robótica en Stanford), Bill Roscoe (Oxford Blockchain Center) y Alessio Lomuscio (profesor de IA segura en Imperial College)—garantiza que las soluciones de OpenMind sean seguras, conformes y fiables.
La solución de OpenMind: dos capas, un solo orden
OpenMind ha creado una infraestructura reutilizable que permite que los robots colaboren y compartan información entre dispositivos, fabricantes y fronteras:
- Lado del dispositivo: OM1, sistema operativo nativo en IA para robots físicos, cierra el ciclo de la percepción a la ejecución para que cualquier robot—sin importar su configuración—pueda comprender su entorno y cumplir tareas.
- Lado de red: FABRIC, red de colaboración descentralizada, proporciona identidad, asignación de tareas y mecanismos de comunicación para que los robots puedan identificarse, asignarse tareas y compartir estados en tiempo real.
Este planteamiento dual (“sistema operativo + capa de red”) permite que los robots no solo actúen de forma autónoma, sino que también coordinen y alineen flujos de trabajo para resolver tareas complejas en red bajo un estándar colaborativo común.
OM1: sistema operativo nativo en IA para robots del mundo físico
Así como un smartphone necesita iOS o Android para ejecutar aplicaciones, los robots requieren un sistema operativo capaz de desplegar modelos de IA, procesar datos de sensores, inferir y ejecutar acciones.
OM1 cumple esta función, actuando como sistema operativo nativo en IA para robots reales. Les permite percibir, entender, planificar y operar en cualquier contexto. A diferencia de los sistemas tradicionales cerrados, OM1 es de código abierto, modular y agnóstico en hardware—compatible con humanoides, cuadrúpedos, robots de ruedas, brazos robóticos, y más.
Cuatro pasos esenciales: de la percepción a la acción
OM1 descompone la inteligencia robótica en cuatro etapas claves: Percepción → Memoria → Planificación → Acción. Cada fase es modular y se integra mediante un lenguaje de datos estándar, permitiendo mezclar, combinar y verificar los componentes de inteligencia.
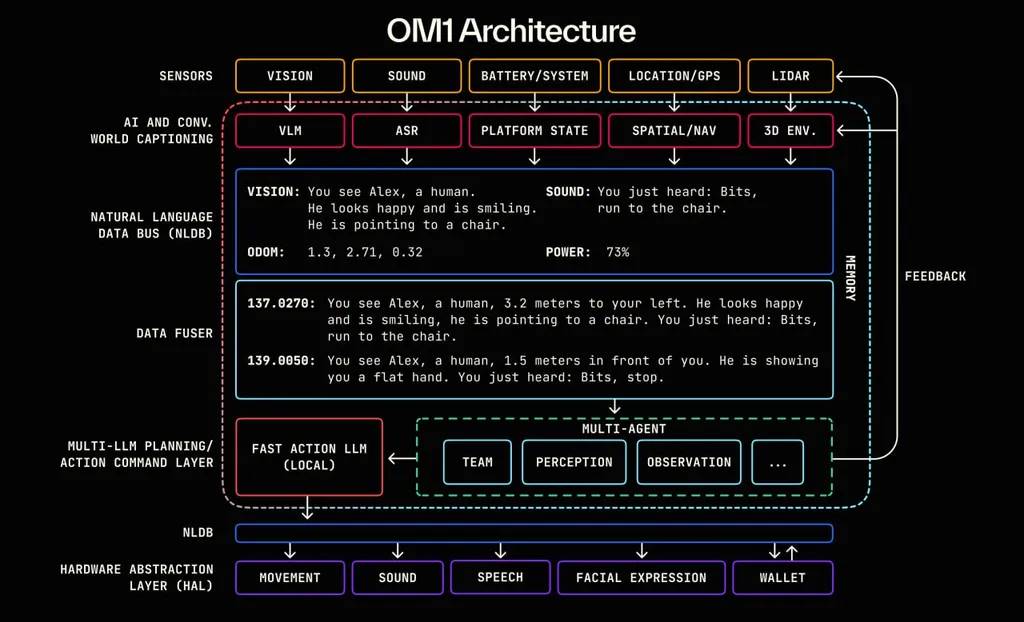
Arquitectura OM1
Las siete capas de OM1 son:
- Capa de sensores: Recoge señales de cámaras, LIDAR, micrófonos, estado de batería, GPS y otros orígenes multimodales.
- Capa de IA + descripción del entorno: Modelos multimodales traducen datos visuales, de audio y estado en descripciones en lenguaje natural (ejemplo: “Observas a una persona saludando”).
- Bus de datos en lenguaje natural: Convierte las percepciones en frases con sello temporal para intercambio entre módulos.
- Fusor de datos: Integra entradas para generar prompts contextuales completos en las decisiones posteriores.
- Capa multidispositivo de planificación/decisión IA: Varias LLM interpretan el contexto y trazan planes de acción según reglas “on-chain”.
- Canal descendente NLDB: Transmite los resultados de decisión mediante un intermediario lingüístico al sistema de ejecución hardware.
- Capa de abstracción de hardware: Traduce órdenes en lenguaje a controles de bajo nivel para movimiento, habla, transacciones, etc.
Incorporación ágil y despliegue a gran escala
OM1 ofrece utilidades integradas para transformar ideas en tareas ejecutadas por robots en poco tiempo:
- Despliegue ultra-rápido de habilidades: Usa lenguaje natural y modelos de gran tamaño para añadir nuevos comportamientos en horas, no meses.
- Fusión multimodal: Integra fácilmente LiDAR, visión, audio y otros sensores sin necesidad de programar la lógica de fusión.
- APIs de grandes modelos preinstaladas: Interfaces para GPT-4o, DeepSeek, VLMs y otros modelos de lenguaje/visión, incluidas interacciones de voz.
- Compatibilidad de hardware y software total: Se conecta de forma nativa con ROS2, Cyclone DDS y los principales protocolos, integrándose con middleware robótico existente. Ya sea Unitree G1 humanoide, Go2 cuadrúpedo, Turtlebot o brazo robótico, OM1 puede conectar de forma nativa.
- Integración con FABRIC: OM1 habilita identidad, coordinación de tareas y pagos “on-chain”, permitiendo que los robots se unan a la red de colaboración global o actúen en solitario.
OM1 ya se utiliza en casos reales:
- Frenchie (cuadrúpedo Unitree Go2): Completó tareas complejas en el USS Hornet Defense Technology Showcase 2024.
- Iris (humanoide Unitree G1): Participó en demostraciones humano-robot en directo en el stand de Coinbase en EthDenver 2025 y será implantado en programas educativos de universidades estadounidenses a través de RoboStore.
FABRIC: Red descentralizada de colaboración entre humanos y máquinas
Incluso los robots más avanzados apenas progresan si no pueden colaborar de forma segura y confiable. En realidad, los robots de distintos fabricantes operan de manera cerrada, lo que impide el intercambio de datos y habilidades; la colaboración entre marcas o países carece de identificación fiable y protocolos comunes. Entre los retos principales:
- Identidad y localización: Verificar quién es un robot, dónde está y qué hace.
- Intercambio de habilidades y datos: Que los robots compartan datos y accedan a capacidades de otros con seguridad.
- Gobernanza del control: Definir la frecuencia, alcance y condiciones de uso y devolución de habilidades y datos.
FABRIC resuelve estos desafíos. Es la red descentralizada de colaboración de OpenMind que aporta identidad, asignación de tareas, comunicación y liquidación unificadas para robots y sistemas inteligentes. FABRIC sirve como:
- GPS para robots: Permite conocer ubicación y aptitud de colaboración de cualquier robot conectado.
- VPN para robots: Facilita conexiones seguras y directas sin configuración compleja ni IP pública.
- Planificador de tareas: Automatiza la publicación, aceptación y registro de todo el ciclo de ejecución de tareas.
Casos de uso clave
FABRIC ya gestiona aplicaciones reales como:
- Control y supervisión remota: Operar robots a distancia y de forma segura, sin necesidad de red especial.
- Marketplaces “Robot-as-a-Service”: Pedir robots para limpieza, inspección, reparto, etc., igual que solicitar un VTC.
- Cartografía y recopilación de datos colaborativa: Robots o flotas suben datos del entorno en tiempo real, creando mapas precisos y compartidos.
- Escaneado/cartografía a demanda: Utilizar robots locales para modelado 3D, estudios de obras o recopilación de pruebas para seguros.
FABRIC aporta verificación y trazabilidad transparentes de quién hizo qué, dónde y con qué resultado, además de delimitar claramente límites de ejecución y uso de habilidades.
A largo plazo, FABRIC aspira a convertirse en la “App Store” de la inteligencia artificial: habilidades licenciables e invocables globalmente, cuyos datos de uso alimentan los modelos y la evolución de la red.
Web3: la apertura como base en la sociedad de las máquinas
La industria robótica avanza hacia la centralización, con plataformas que controlan hardware, algoritmos y redes, frenando la innovación externa. La descentralización permite que, independientemente del fabricante u operador, los robots colaboren, compartan habilidades y liquiden recompensas en una red abierta—sin depender de ninguna plataforma propietaria.
OpenMind emplea infraestructura “on-chain” para codificar normas colaborativas, permisos de habilidades y modelos de pago en un “orden de red” transparente, verificable y actualizable:
- Identidad verificable: Cada robot y usuario registra una identidad única “on-chain” (estándar ERC-7777), totalmente transparente en rasgos físicos, roles y permisos.
- Distribución pública de tareas: Las tareas se publican, adjudican y aceptan bajo reglas públicas, sin restricciones de plataformas cerradas. Todos los procesos colaborativos originan pruebas cifradas con marca temporal y geográfica almacenadas “on-chain”.
- Liquidación y reparto automáticos: Tras cada tarea se liberan ingresos, seguros y depósitos o estos se retienen automáticamente; cualquier parte puede verificar resultados en tiempo real.
- Liquidez global de habilidades: Contratos inteligentes regulan límites de uso y compatibilidad; se protege la propiedad intelectual y se permite la explotación mundial.
Este marco colaborativo es abierto y accesible para todo el ecosistema: se puede usar, observar y mejorar por cualquier agente. Para los usuarios de Web3, esto significa que la economía robótica nace sin monopolios, es componible y auditable—una oportunidad única de que la “apertura” sea el cimiento de la sociedad de las máquinas.
Liberar la inteligencia embebida de su aislamiento
Ya sea patrullando hospitales, aprendiendo en escuelas o cartografiando barrios, los robots pasan de ser meras demostraciones a convertirse en participantes fiables y cotidianos dentro de la sociedad humana. Funcionan de manera continua, cumplen normas, memorizan, adquieren habilidades y colaboran de forma natural con personas y otras máquinas.
Escalar estos escenarios requiere más que una robótica inteligente: hace falta un protocolo fiable y fundamental para la interoperabilidad y la colaboración. OpenMind, con OM1 y FABRIC, ha sentado las bases: OM1 dota a los robots de comprensión y autonomía real; FABRIC extiende estas capacidades globalmente. El siguiente paso es expandir esta infraestructura a más ciudades y redes, convirtiendo las máquinas en socios duraderos y fiables dentro del tejido social.
La estrategia de OpenMind es nítida:
Corto plazo: Completar el prototipo central de OM1 y el MVP de FABRIC; lanzar identidad “on-chain” y funciones colaborativas clave.
Medio plazo: Implantar OM1 y FABRIC en educación, hogares y empresas; conectar a los pioneros y fomentar comunidades de desarrolladores.
Largo plazo: Convertir OM1 y FABRIC en el estándar mundial para que cualquier máquina pueda sumarse a esta red abierta—tan fácil como conectarse a Internet—y propulsar así una economía global y sostenible de máquinas.
En la era Web2, los robots operaban en silos propietarios, incapaces de transferir funciones y datos entre plataformas. En la visión de OpenMind, los robots son nodos iguales en una red global abierta, capaces de unirse, aprender, colaborar y liquidar pagos junto con personas en una sociedad de máquinas abierta y fiable. OpenMind posibilita esta transformación a escala.
Aviso legal:
- Este artículo se ha publicado nuevamente desde TechFlow. Los derechos de autor pertenecen al autor original TechFlow. Si tiene alguna objeción sobre esta publicación, póngase en contacto con el equipo de Gate Learn. Atenderemos su solicitud con prontitud y conforme a los procedimientos aplicables.
- Aviso legal: Las opiniones aquí expresadas son propias del autor y no constituyen asesoramiento de inversión.
- Las versiones en otros idiomas de este artículo han sido traducidas por el equipo de Gate Learn. No reproduzca, distribuya ni copie este artículo traducido salvo que se mencione expresamente a Gate.com como fuente.
Artículos relacionados

¿Qué es Tronscan y cómo puedes usarlo en 2025?

¿Qué es SegWit?

Todo lo que necesitas saber sobre Blockchain

¿Qué hace que Blockchain sea inmutable?

¿Qué es Stablecoin?
