Guia Completo do OpenMind: Como Construir um Sistema Operacional Global e uma Rede de Confiança para Inteligência Incorporada
Por que a Era da Robótica Aberta é Fundamental
Nos próximos 5 a 8 anos, espera-se que a população global de robôs ultrapasse um bilhão. Esse cenário marca um momento decisivo em que os robôs deixam de ser demonstrações isoladas e passam a desempenhar um papel central na divisão de trabalho da sociedade. Eles deixarão de ser apenas braços mecânicos em linhas de montagem para se tornarem colegas, professores e parceiros capazes de perceber, compreender, tomar decisões e colaborar com pessoas.
Enquanto o hardware da robótica evoluiu rapidamente — com mãos mais ágeis, locomoção estável e sensores aprimorados — o verdadeiro obstáculo não está nos componentes físicos, mas sim em como robôs podem compartilhar conhecimento e colaborar:
- Os softwares de diferentes fabricantes permanecem incompatíveis, o que dificulta o compartilhamento de habilidades e inteligência entre robôs.
- A lógica de decisão permanece restrita a sistemas fechados, bloqueando a verificação ou otimização externa.
- Arquiteturas de controle centralizadas inibem a inovação e tornam mais difícil estabelecer confiança.
Essa fragmentação impede que o setor de robótica transforme avanços em IA em ganhos produtivos em larga escala: vemos inúmeras demonstrações isoladas, mas falta migração entre dispositivos, decisões verificáveis e colaboração padronizada. Por isso, a verdadeira escalabilidade ainda não foi atingida. A OpenMind está solucionando esse desafio crucial. Nossa missão não é apenas criar um robô dançarino melhor, mas sim oferecer uma base de software unificada e um padrão colaborativo para os robôs diversos do mundo:
- Capacitar robôs a entenderem contexto e aprenderem uns com os outros;
- Permitir que desenvolvedores criem aplicações rapidamente em plataformas abertas e modulares;
- Possibilitar que pessoas e máquinas colaborem e realizem transações de forma segura, a partir de protocolos descentralizados.
Resumindo, a OpenMind está criando o sistema operacional universal para robôs — uma solução que habilita não apenas percepção e ação, mas também colaboração segura e escalável via mecanismos descentralizados, em qualquer ambiente.
Investidores Dessa Visão: US$ 20 Milhões de Financiamento e Um Time Global
A OpenMind obteve US$ 20 milhões nas rodadas Seed e Série A, lideradas pela Pantera Capital, com participação de grandes nomes de tecnologia e investimento mundial:
- Tecnologia e capital do Ocidente: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group e outros. Essas empresas são referência em infraestrutura cripto e de IA, apoiando o emergente “mercado de agentes e internet das máquinas”.
- Recursos industriais do Oriente: Sequoia China e outros líderes experientes em cadeia de suprimentos e manufatura robótica, com vivência dos desafios práticos e limites da massificação de máquinas.
Ao mesmo tempo, a OpenMind trabalha lado a lado com participantes tradicionais do mercado de capitais, como a KraneShares, para viabilizar a inclusão do valor de longo prazo da convergência “robótica + IA” em produtos financeiros estruturados, aproximando os ecossistemas de cripto e ações. Em junho de 2025, quando a KraneShares lançou o Global Humanoid & Embodied Intelligence Index ETF (KOID), a cerimônia de abertura da NASDAQ contou com “Iris” tocando o sino, uma robô humanoide criada em parceria entre OpenMind e RoboStore — a primeira vez em que um robô humanoide fez essa cerimônia no pregão.
Nas palavras de Nihal Maunder, sócio da Pantera Capital:
“Se queremos que máquinas inteligentes atuem em ambientes abertos, precisamos de uma rede de inteligência aberta. O que a OpenMind constrói para robôs é o que o Linux fez pelo software e o Ethereum pelo blockchain.”
Equipe e Consultores: Do Laboratório à Linha de Produção
Jan Liphardt, fundador da OpenMind, é professor associado em Stanford, ex-Berkeley, especialista em dados e sistemas distribuídos, com forte bagagem acadêmica e de engenharia. Ele defende o reuso de código aberto, substituindo sistemas de caixa-preta por mecanismos auditáveis e rastreáveis, integrando IA, robótica e criptografia de forma interdisciplinar.
A equipe principal reúne talentos de OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity e outros, atuando em áreas essenciais como controle de robôs, percepção e navegação, orquestração multimodal com LLMs, sistemas distribuídos e protocolos on-chain. O conselho consultivo conta com líderes acadêmicos e do setor — como Steve Cousins (Stanford), Bill Roscoe (Oxford Blockchain Center) e o Professor Alessio Lomuscio (Imperial College) — garantindo segurança, conformidade e confiabilidade às soluções de robótica da OpenMind.
A Solução da OpenMind: Duas Camadas, Um Propósito
A OpenMind desenvolveu uma infraestrutura reaproveitável que permite colaboração e troca de informações entre robôs de diferentes dispositivos, fabricantes e regiões:
- Lado do dispositivo: OM1, um sistema operacional nativo de IA para robôs físicos, fecha o ciclo da percepção à execução, de modo que qualquer robô — independentemente de sua forma — entenda o ambiente e realize tarefas.
- Lado da rede: FABRIC, rede descentralizada de colaboração que fornece identidade, alocação de tarefas e comunicação para que robôs se reconheçam, deleguem tarefas e compartilhem status em tempo real.
Essa abordagem de “sistema operacional + camada de rede” permite que robôs ajam de modo autônomo e coordenem fluxos de trabalho para cumprir tarefas complexas em uma rede colaborativa única.
OM1: Sistema Operacional Nativo de IA para o Mundo Físico
Assim como smartphones necessitam de iOS ou Android para executar aplicativos, robôs exigem um sistema operacional capaz de rodar modelos de IA, processar dados de sensores, fazer inferências e executar comandos.
O OM1 é projetado para isso: serve como sistema operacional nativo de IA para robôs reais. Ele permite percepção, compreensão, planejamento e atuação em qualquer cenário. Ao contrário dos sistemas fechados tradicionais, o OM1 é modular, open-source e compatível com qualquer hardware — incluindo humanoides, quadrúpedes, robôs de rodas, braços robóticos e outros.
Quatro Etapas Fundamentais: Da Percepção à Ação
O OM1 estrutura a inteligência robótica em quatro etapas: Percepção → Registro → Planejamento → Ação. Cada etapa é modular e unificada por uma linguagem de dados, permitindo trocar e validar componentes de inteligência.
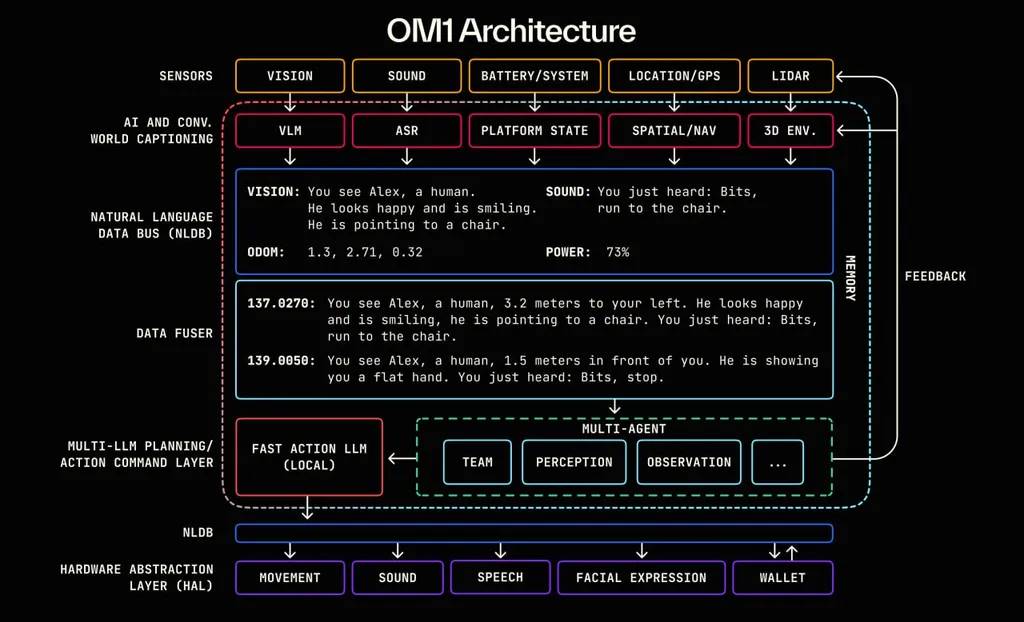
Arquitetura OM1
São sete camadas:
- Camada de Sensores: Coleta informações de câmeras, LIDAR, microfones, bateria, GPS e fontes multimodais.
- Camada IA + Modelagem do Ambiente: Modelos multimodais convertem dados visuais, sonoros e de status em linguagem natural (ex: “Você vê uma pessoa acenando”).
- Barramento de Dados em Linguagem Natural: Transforma percepções em frases com data/hora, trocadas entre módulos.
- Fusor de Dados: Integra insumos gerando prompts contextuais completos para decisões posteriores.
- Camada de Planejamento Multi-IA: Diversos LLMs analisam o contexto e formulam planos com base em regras on-chain.
- Canal Descendente NLDB: Transmite decisões, via intermediário de linguagem, ao sistema de execução do robô.
- Camada de Abstração de Hardware: Traduz comandos em linguagem em controles de baixo nível para movimentos, fala, transações e muito mais.
Onboarding Rápido e Ampliação de Uso
O OM1 oferece ferramentas para transformar ideias em tarefas executáveis por robôs de forma ágil:
- Implantação rápida de habilidades: Utilize linguagem natural e grandes modelos para criar comportamentos em horas, não meses.
- Fusão multimodal: Combine sensores LiDAR, visão, áudio e outros facilmente, sem lógica manual.
- APIs integradas de grandes modelos: Conexão nativa com GPT-4o, DeepSeek, VLMs e outros, inclusive para interação por voz.
- Ampla integração hardware/software: Compatível com ROS2, Cyclone DDS e outros protocolos do setor, conectando-se ao middleware já existente. Seja Unitree G1, Go2, Turtlebot ou braço robótico, o OM1 integra tudo nativamente.
- Integração FABRIC: OM1 suporta identidade, coordenação de tarefas e pagamentos on-chain, permitindo que robôs ingressem na rede global, além de operarem de forma independente.
O OM1 já está sendo adotado em cenários práticos:
- Frenchie (Unitree Go2 quadrúpede): Cumpriu missões complexas na USS Hornet Defense Technology Showcase 2024.
- Iris (Unitree G1 humanoide): Participou de demonstrações ao vivo no estande da Coinbase na EthDenver 2025 e está sendo implementada em programas educacionais universitários nos EUA via RoboStore.
FABRIC: Rede Descentralizada de Colaboração Humano-Máquina
Mesmo os robôs mais avançados se limitam sem colaboração segura e confiável. Normalmente, robôs de diferentes fabricantes operam em sistemas fechados, impedindo o compartilhamento de dados e habilidades; a colaboração entre marcas ou fronteiras carece de identificação confiável e protocolos padrões. Os principais desafios são:
- Identidade e localização: Saber quem é o robô, onde está e o que faz.
- Compartilhamento de habilidades e dados: Garantir compartilhamento seguro de dados e acesso às capacidades dos outros robôs.
- Governança de controle: Definir frequência, alcance e condições de devolução de habilidades e informações.
FABRIC resolve essas questões. É a rede descentralizada da OpenMind que oferece identidade, tarefas, comunicação e liquidação financeira automática padronizadas para robôs e sistemas inteligentes. Atua como:
- GPS dos robôs: Mostrando localização e aptidão para colaboração.
- VPN dos robôs: Conexões diretas e seguras, sem IPs públicos ou configurações difíceis.
- Agendador de tarefas: Automatiza publicação, aceite e registro de todo o ciclo das tarefas.
Principais Aplicações
FABRIC já atende vários casos reais, como:
- Controle remoto e monitoramento: Operação segura de robôs de qualquer lugar, sem precisar de redes especiais.
- Mercado de robôs como serviço: Solicite robôs para limpeza, inspeção, entrega e outros — como pedir transporte por aplicativo.
- Mapeamento e coleta de dados colaborativos: Frotas de robôs enviam dados ambientais em tempo real, criando mapas compartilhados e precisos.
- Escaneamento/mapeamento sob demanda: Ative robôs locais para modelagem 3D, levantamentos, avaliações de seguros e outros.
FABRIC traz verificação transparente e rastreabilidade sobre quem realizou qual tarefa, onde e com qual resultado — além de delimitar claramente o uso de habilidades e execuções.
Com o tempo, FABRIC pretende ser a “App Store” da inteligência de máquinas: habilidades podem ser licenciadas e usadas globalmente, e os dados de uso alimentam os modelos, impulsionando a constante evolução da rede.
Web3: Tornando a Sociedade das Máquinas Aberta de Verdade
A indústria robótica está cada vez mais centralizada, com poucas plataformas controlando hardware, algoritmos e redes, travando a inovação. A descentralização garante que, independentemente de quem desenvolve ou opera um robô, ele possa colaborar, trocar habilidades e distribuir recompensas em uma rede aberta — sem exigir plataforma proprietária.
A OpenMind utiliza infraestrutura on-chain para registrar regras de colaboração, permissões e esquemas de pagamentos em um “protocolo da rede” transparente, auditável e atualizável:
- Identidade verificável: Cada robô e operador tem identidade on-chain única (padrão ERC-7777), com funções, permissões e características visíveis.
- Distribuição aberta de tarefas: Tarefas são publicadas, ofertadas e atribuídas com regras públicas, sem restrições. Toda colaboração gera provas criptografadas com data, hora e local, registradas on-chain.
- Liquidação financeira automática e distribuição de receitas: Ao final da tarefa, receitas, seguro e depósitos são enviados ou retidos automaticamente; qualquer um pode verificar os resultados em tempo real.
- Liquidez global das habilidades: Contratos on-chain estabelecem limites de uso e compatibilidade, protegendo a propriedade intelectual e permitindo uso e distribuição no mundo todo.
Esse modelo colaborativo é aberto — todo ecossistema pode usar, auditar e aprimorar. Para usuários Web3, isso significa o nascimento da economia robótica sem monopólios, interoperável e totalmente auditável — uma chance inédita de fazer da abertura o alicerce da sociedade das máquinas.
Impulsionando a Inteligência Incorporada para Romper o Isolamento
Robôs deixam de ser meras demonstrações e passam a atuar em hospitais, escolas e cidades como participantes confiáveis da vida cotidiana. Funcionam 24 horas, seguem regras, guardam memórias e habilidades, colaborando naturalmente com humanos e máquinas.
Para escalar esses casos, é preciso mais do que robôs avançados — é necessário um protocolo confiável de interoperabilidade e colaboração. OM1 e FABRIC, da OpenMind, estabelecem essa base: OM1 oferece compreensão de mundo e autonomia a robôs; FABRIC distribui essas capacidades globalmente. O próximo passo é expandir essa infraestrutura para mais cidades e redes, tornando máquinas parceiras confiáveis no tecido social.
A estratégia da OpenMind é objetiva:
Curto prazo: Concluir o protótipo do OM1 e o MVP do FABRIC; lançar identidade on-chain e recursos principais de colaboração.
Médio prazo: Implementar OM1 e FABRIC em educação, lares e empresas; conectar os primeiros usuários e incentivar comunidades de desenvolvedores.
Longo prazo: Transformar OM1 e FABRIC em padrão global, possibilitando que qualquer máquina se conecte a essa rede aberta — como acontece com a internet — e impulsione uma economia global e sustentável de máquinas.
Na era Web2, robôs estavam isolados em sistemas fechados, sem cruzamento de dados ou funções. No futuro vislumbrado pela OpenMind, robôs são nós iguais em uma rede global aberta: livres para entrar, aprender, colaborar e realizar pagamentos ao lado de seres humanos, em uma sociedade de máquinas transparente e confiável. É a OpenMind que torna essa transformação escalável possível.
Avisos:
- Este artigo foi republicado de TechFlow. Os direitos autorais pertencem ao autor original TechFlow. Caso tenha dúvidas sobre esta republicação, entre em contato com a Equipe Gate Learn. Sua solicitação será atendida prontamente de acordo com nossos procedimentos.
- Aviso: As opiniões aqui expressas são de responsabilidade exclusiva do autor e não constituem recomendação de investimento.
- Outras versões deste artigo em diferentes idiomas foram traduzidas pela equipe Gate Learn. Não reproduza, distribua ou copie esta tradução sem o devido crédito ao Gate.com.
Artigos Relacionados

O que é Bitcoin?

O que é o PolygonScan e como você pode usá-lo? (Atualização 2025)

O que é EtherVista, o autoproclamado "Novo Padrão para DEX"?

O que é Coti? Tudo o que você precisa saber sobre o COTI

O que é Tronscan e como você pode usá-lo em 2025?
