OpenMind Explained: Creating a Global Operating System and Trust Network for Embodied Intelligence
Over the next 5–8 years, the global robot population will exceed 1 billion—a critical inflection point as they shift from isolated demos to integration into the broader workforce. Robots will no longer be just mechanical arms on an assembly line; they are becoming colleagues, teachers, and partners who can perceive, understand, make decisions, and collaborate alongside humans.
Recently, the “muscles” of robotics—hardware—have advanced rapidly, with greater dexterity, steadier movement, and a wider array of sensors. The key bottleneck, however, is not in metal or motors, but in enabling shared intelligence and collaboration:
- Vendors’ software ecosystems remain siloed, so robots cannot share skills or intelligence.
- Decision logic is trapped in closed systems, making external verification and optimization impossible.
- Centralized control architectures slow innovation and increase trust costs.
This fragmentation prevents the robotics industry from translating advances in AI models into scalable productivity: while stand-alone demos proliferate, widespread deployment is hampered by the lack of cross-device migration, verifiable decisions, and standardized collaboration. OpenMind sets out to close this “last mile.” Our mission is not to build a more advanced robot, but to provide unified software and collaboration standards for billions of diverse robots worldwide:
- Empowering robots with contextual understanding and mutual learning capabilities
- Enabling developers to rapidly build applications on an open-source, modular infrastructure
- Facilitating secure human-machine collaboration and settlement within decentralized frameworks
OpenMind is building the universal operating system for robots—enabling them to sense, act, and, through decentralized collaboration, safely work together at scale in any environment.
Backing the Vision: $20M in Funding & a Global Investor Roster
OpenMind has secured $20 million in Seed and Series A funding, led by Pantera Capital, with an investor lineup that includes some of the world’s top tech and capital players:
- Western technology and capital heavyweights: Ribbit, Coinbase Ventures, DCG, Lightspeed Faction, Anagram, Pi Network Ventures, Topology, Primitive Ventures, Amber Group, and more—longstanding leaders in crypto and AI infrastructure, betting on the foundational paradigm of “agent economies and the machine internet.”
- Eastern industrial leaders: Sequoia China and others, deeply rooted in robotics supply chains and manufacturing, bringing a deep understanding of the challenges and thresholds of scaling robot production.
Meanwhile, OpenMind is actively collaborating with traditional financial market participants like KraneShares to explore ways to integrate the long-term value of robot-and-agent into structured financial products—bridging crypto and equity markets. In June 2025, when KraneShares launched the Global Humanoid & Embodied Intelligence Index ETF (KOID), it featured “Iris,” a humanoid robot co-developed by OpenMind and RoboStore, ringing the opening bell at Nasdaq. This was the first time in exchange history that a humanoid robot performed this ceremony.
As Nihal Maunder, partner at Pantera Capital, put it:
“If we want intelligent machines to operate in open environments, we need an open intelligence network. OpenMind is doing for robots what Linux did for software and Ethereum for blockchain.”
Team & Advisors: From the Lab to the Production Line
OpenMind’s founder, Jan Liphardt, is an Associate Professor at Stanford, former Berkeley professor, and an expert in data and distributed systems across both academia and engineering. He advocates for open-source reuse, replacing black boxes with auditable, traceable mechanisms, and integrating AI, robotics, and cryptography through interdisciplinary approaches.
The core OpenMind team brings experience from OKX Ventures, Oxford Robotics Institute, Palantir, Databricks, Perplexity, and more, with expertise spanning robot control, perception and navigation, multimodal/LLM orchestration, distributed systems, and on-chain protocols. A distinguished advisory board, featuring industry and academic figures such as Steve Cousins (Head of Stanford Robotics), Bill Roscoe (Oxford Blockchain Center), and Alessio Lomuscio (Imperial College Secure AI), ensures safety, compliance, and reliability for robotic systems.
OpenMind’s Approach: Two-Layer Architecture, Unified Order
OpenMind has created reusable infrastructure, enabling robots to collaborate and exchange information across devices, vendors, and even national borders:
- Device Layer: The OM1 AI-native operating system for physical robots connects the full loop from perception to execution, enabling all robot forms to understand their environment and complete tasks.
- Network Layer: The decentralized FABRIC collaboration network provides identity, task assignment, and communication, ensuring robots can recognize each other, share tasks, and maintain synchronized status during cooperation.
This “operating system + network” combo empowers robots not just to act independently, but to coordinate, align workflows, and collectively tackle complex assignments within a unified collaboration network.
OM1: The AI-Native Operating System for the Physical World
Just as smartphones need iOS or Android to run applications, robots need an OS to run AI models, process sensor data, make reasoned decisions, and perform actions.
OM1 is purpose-built for this: an AI-native OS for real-world robots, empowering them to perceive, understand, plan, and execute in any environment. Unlike traditional, closed architectures, OM1 is open-source, modular, and hardware-agnostic—it runs on humanoids, quadrupeds, wheeled robots, robotic arms, and more.
The Four Pillars: From Perception to Execution
OM1 decomposes robot intelligence into four generic steps: Perception → Memory → Planning → Action. This pipeline is fully modularized in OM1, unified by a common data language, and enables composable, replaceable, and verifiable intelligence capabilities.
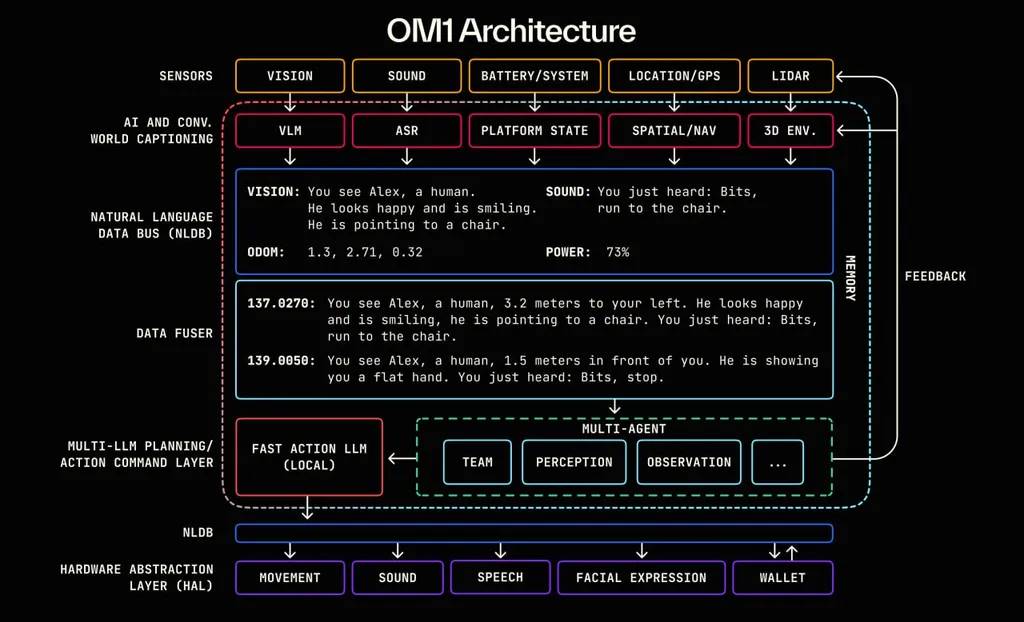
OM1 Architecture
The OM1 architecture includes seven layers:
- Sensor Layer: Collects data—cameras, LIDAR, microphones, battery status, GPS, and other modalities.
- AI and World Captioning Layer: Translates input—multimodal models convert vision, speech, and status into natural language (e.g., “you see a person waving”).
- Natural Language Data Bus: Transports information—sensed data is turned into timestamped language snippets for module-to-module communication.
- Data Fuser: Synthesizes multisource input to generate the decision context (prompt).
- Multi-AI Planning/Decision Layer: Multiple large language models (LLMs) interpret context and use blockchain-based rules to plan actions.
- NLDB Downlink: Relays decisions via the language interface to the hardware interface.
- Hardware Abstraction Layer: Translates language directives into low-level hardware commands—driving movement, speech, transactions, and more.
Rapid Onboarding and Deployment
To turn ideas into actionable robotic tasks fast, OM1 offers:
- Rapid skill integration: Add new behaviors in hours (not months of coding) via natural language and large models.
- Multimodal flexibility: Easily combine LiDAR, vision, sound, etc., eliminating the need for complex custom sensor fusion.
- Pre-integrated large language model (LLM) interfaces: Built-in support for GPT-4o, DeepSeek, vision-language models (VLMs), and more, enabling voice and vision interaction.
- Broad compatibility: Supports ROS2, Cyclone DDS, and other industry protocols, integrating with mainstream robotic middleware. Whether it’s Unitree G1 humanoids, Go2 quadrupeds, Turtlebot, or robotic arms—they are directly compatible.
- FABRIC integration: Native support for identity, task coordination, and on-chain payments—empowering both local and global collaboration.
OM1 is already deployed in live environments:
- Frenchie (Unitree Go2 quadruped): Executed complex tasks at the USS Hornet Defense Tech Demo 2024.
- Iris (Unitree G1 humanoid): Live human-robot interaction at EthDenver 2025’s Coinbase booth, with plans to enter U.S. university curricula via RoboStore’s education program.
FABRIC: The Decentralized Human-Machine Collaboration Network
Even with powerful artificial intelligence, robots are ineffective collaborators if they cannot interact securely and verifiably. In practice, robots from different vendors operate in silos—unable to exchange skills or data, and lacking unified identity or rules for cross-brand or cross-border collaboration. This creates critical challenges:
- Identity and location verification: How does a robot prove who it is, where it is, and what it’s doing?
- Skill and data sharing: How is permission granted for data sharing and skill execution?
- Controlling privileges: How to set usage limits, scopes, and data return rules for skill use?
FABRIC addresses precisely these issues. It is OpenMind’s decentralized collaboration network—providing unified infrastructure for identity, task management, communication, and settlement between robots and intelligent systems. It’s like:
- GPS—for robots to know each other’s location, proximity, and collaboration readiness.
- VPN—enabling direct, secure robot-to-robot connections without public IPs or complex setups.
- Task scheduler—automatically publishing, accepting, and documenting the entire task lifecycle.
Key Use Cases
FABRIC already supports a wide range of scenarios, including:
- Remote operation and monitoring: Securely control robots from anywhere, without specialized networks.
- Robot-as-a-Service marketplaces: Summon robots on demand for cleaning, inspections, delivery, and more—similar to a ride-hailing application.
- Crowdsourced mapping and data gathering: Fleets and robots upload real-time road, obstacle, and environmental data to build shareable, high-definition maps.
- On-demand scanning/mapping: Dispatch nearby robots for 3D modeling, building surveys, or insurance documentation as needed.
FABRIC ensures that “who did what, where, and what was accomplished” is always traceable and verifiable, with clear boundaries for skill usage and task execution.
Long term, FABRIC is poised to become the “App Store” for machine intelligence: skills authorized for global use, data flows that improve AI models, and an ever-evolving collaboration ecosystem.
Web3: Building Openness into the Machine Economy
The robotics industry is trending towards consolidation, with a handful of platforms controlling hardware, algorithms, and networks—blocking outside innovation. Decentralization means that any robot, regardless of origin or geography, can join an open network to cooperate, trade skills, and settle payments—without platform lock-in.
OpenMind leverages on-chain infrastructure to encode collaboration rules, access permissions, and revenue sharing into public, verifiable, and improvable network governance.
- Verifiable identity: Every robot and operator registers a unique on-chain identity (ERC-7777 standard), detailing hardware specs, assigned roles, and permissions—fully transparent.
- Open task allocation: Tasks are openly published, bid on, and matched under public rules, not in closed black boxes. All collaboration generates cryptographic, timestamped, geolocated proofs, stored on-chain.
- Automated settlement and revenue sharing: On task completion, profit sharing, insurance, and deposit release or deduction are triggered automatically, with instant, public verification.
- Free skill circulation: New skills can be governed by smart contracts—specifying execution limits and compatible devices—to protect intellectual property while enabling global skill sharing.
This creates a collaborative order that all participants can access, supervise, and improve. For Web3 users, it means the robot economy is non-monopolistic, composable, and verifiable by design—this represents a foundational upgrade that embeds openness into the machine economy.
Opening Up Embodied Intelligence
Whether making hospital rounds, learning new skills in schools, or inspecting and modeling city neighborhoods, robots are moving beyond demonstration mode to become reliable contributors to the daily division of labor. They operate 24/7, follow established protocols, retain memory and skills, and collaborate naturally with humans and other machines.
To make these scenarios scalable, we don’t just need smarter machines—we need foundational order that guarantees trust, interoperability, and collaboration. OpenMind has laid the first foundational layers with OM1 and FABRIC: OM1 lets robots truly understand and act on the world, and FABRIC enables these capabilities to circulate through a global network. The next phase is to extend this infrastructure across more cities and networks, making machines reliable, long-term partners in society.
OpenMind’s plan is clear:
Short-term: Deliver OM1 core features and FABRIC MVP; launch on-chain identity and foundational collaboration functions.
Mid-term: Deploy OM1 and FABRIC in education, homes, and businesses—connect early node partners and rally a developer community.
Long-term: Establish OM1 and FABRIC as global standards, allowing any machine to plug into this open collaboration network as easily as joining the internet—building a sustainable global machine economy.
In the Web2 era, robots were locked in proprietary ecosystems, unable to share data or capabilities across platforms. In the OpenMind ecosystem, they become equal nodes in an open network—free to join, learn, collaborate, and settle, forming a trustworthy, interconnected global machine society alongside humans. OpenMind is providing the scalable infrastructure to enable this transformation.
Disclaimer:
- This article is republished from [TechFlow]; copyright belongs to the original author [TechFlow]. For republication concerns, please contact the Gate Learn Team; we will respond promptly per our policies.
- Disclaimer: The views and opinions expressed in this article are solely the author’s and do not constitute financial or investment advice.
- Other language versions are translated by the Gate Learn Team. Do not reproduce, distribute, or plagiarize translated articles unless Gate is specifically cited.
Related Articles

Solana Need L2s And Appchains?

The Future of Cross-Chain Bridges: Full-Chain Interoperability Becomes Inevitable, Liquidity Bridges Will Decline

Sui: How are users leveraging its speed, security, & scalability?

Navigating the Zero Knowledge Landscape

What Is Ethereum 2.0? Understanding The Merge
